ˮ�����y��Һ����(zh��)�ЙC��(g��u)�O(sh��)Ӌ
������B��һ�Nˮ�����y�Î��ӿڵĆ�����Һ����(zh��)�ЙC��(g��u)��������Һ����(zh��)�ЙC��(g��u)�Ĺ���ԭ����ͨ�^�O(sh��)ӋӋ��_�����������(sh��)���o����ˮ�����y��Һ����(zh��)�ЙC��(g��u)���O(sh��)Ӌ������
����1������
�����S������ʯ����Ȼ��I(y��)�İl(f��)չ���Լ�����ʯ����Ȼ��Ŀ�̽���_�l(f��)����ˮ�^(q��)���~�M��ˮ�����a(ch��n)ϵ�y(t��ng)�ѽ�(j��ng)�ɞ�һ�N��Ҫ����ˮ�_�l(f��)ģʽ�������ڣ�ˮ���y�T��Ҫ����ʽ���l�y�����S����͚���İl(f��)չ�͌�������߉����y�T��������ӣ����y����h(hu��n)���đ�(y��ng)��Խ��Խ�V�������Ľ�Bһ�Nˮ�����y�Î�ˮ�C����( ROV) �ӿڵĆ�����Һ����(zh��)�ЙC��(g��u)��
����2������ԭ��
�������������r�£���(zh��)�ЙC��(g��u)ͨ�^Һ�����(q��)���y�T�P(gu��n)�]��ͨ�^��(f��)λ�����_���y�T�����{(di��o)ԇ��Һ��Դ���ϕr��ͨ�^ROV �ӿ��(q��)�ӡ�ˮ�����y��(zh��)�ЙC��(g��u)��Һ���(q��)�әC��(g��u)�����ɏ�(f��)λ�C��(g��u)��ROV �(q��)�әC��(g��u)�������a������λ��ָʾ����( �D1) �M�ɡ�
������(zh��)�ЙC��(g��u)ÿ��ǻ�w�O(sh��)���ˉ����a�������a�������ý���ĤƬ��ʽ�Y(ji��)��(g��u)������ĤƬһ��(c��)ͨ��ˮ����һ��(c��)�Bͨ��(zh��)�ЙC��(g��u)����ǻ�w�����ڈ�(zh��)�ЙC��(g��u)ǻ�w��(n��i)��M�˽��|(zh��)����(d��ng)����ĤƬ�ܵ���ˮ�������Õr�l(f��)������׃�Σ�ʹ�È�(zh��)�ЙC��(g��u)ǻ�w��(n��i)�ĉ����c��ˮ������ȣ��Ķ����Բ��ø����p���Ě��w�Y(ji��)��(g��u)��ͬ�rҲ���Ժ����ܷ�Y(ji��)��(g��u)��
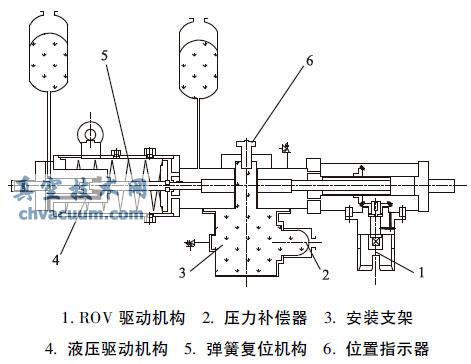
�D1 ˮ�����y��(zh��)�ЙC��(g��u)
������M��ROV ����������(zh��)�ЙC��(g��u)�O(sh��)���˿�ҕ��λ��ָʾ������ͨ�^ROV ��ˮ�z��C�^��ָʾ�C��(g��u)λ���M������(y��ng)���������y��(zh��)�ЙC��(g��u)��λ��ָʾ���O(sh��)����픲���ֱ���cݔ���S���B�����@ʾݔ���S�D(zhu��n)�ӵĽǶȡ�
����ˮ�����y��(zh��)�ЙC��(g��u)���Æ�����Һ���ף�����Һ�����͏������քe�(q��)������(f��)�������Ԍ��F(xi��n)�_��/�P(gu��n)�]�Ĺ��ܡ���(zh��)�ЙC��(g��u)�ЃɷN������ʽ����Һ���ٿغ�ROV �ٿء�
����Һ�������y�T�_���r��Һ����ͨ�^���M���(zh��)�ЙC��(g��u)����ǻ��(n��i)���Ƅӻ��������Ƅӣ������˲��B�ӵĂ��ӗU���X�l�S֮�\�ӣ��X�lͨ�^���y�y�U�ϵ��X݆�D(zhu��n)���y�U���(q��)�����y�P(gu��n)�]���������������Ƶ��^���У����ɲ��౻���s��ͨ�^Һ������˵���λ������ƈ�(zh��)�ЙC��(g��u)������г̡���(d��ng)�y�T��Ҫ���_�r��ж����ǻ��(n��i)Һ���͉��������ɵď����˷��y�T���_�����ͻ����c���w��(n��i)�ڵ�Ħ������ʹ�û��������Ƅӣ�ֱ�����ɻ֏�(f��)��ʼ��B(t��i)���y�T��ȫ���_��
����ROV �����y�T�P(gu��n)�]�r������ROV �Cе���cˮ��(zh��)�ЙC��(g��u)ROV �ӿ��B�ӣ���ROV �Cе��형r����ص������£�ROV ���^ͨ�^�X݆���S���(q��)���ݗU���D(zhu��n)���ڂ�����ĸ�������ݗU�����\�ӣ��Ƅ��X�l�����\�ӣ��X�lͨ�^���y�y�U�ϵ��X݆�D(zhu��n)���y�U���(q��)�����y�P(gu��n)�]��ROV �����y�T�_���r��ROV �Cе����r����D(zhu��n)���ݗU�����\�ӣ��ڏ��ɻ؏�(f��)�����������X�l�����y�U���D(zhu��n)�����F(xi��n)�y�T�_����
����4���Y(ji��)�Z
�����O(sh��)Ӌ�����c��Һ���ٿض˼�ROV �ٿض��M����Ӌ�㣬�_������Ҫ�O(sh��)Ӌ����(sh��)�������ӱ��Լ��ݗU�����M����У�ˣ��C����һ�N���е�ˮ�����y��Һ����(zh��)�ЙC��(g��u)��Q������















