����AutoCAD��PUMA560�C(j��)�����\(y��n)��(d��ng)�W(xu��)�������
��������(j��)PUMA560 �ĽY(ji��)��(g��u)���c(di��n)����(g��u)���˙C(j��)���˵�AutoCADģ�ͺ�D-H ����(bi��o)ϵ�����ÙC(j��)����D-H ����(bi��o)׃�Q����������PUMA560 �C(j��)�����\(y��n)��(d��ng)�W(xu��)����Ĕ�(sh��)�W(xu��)ģ�͡�����AutoCAD ƽ�_����������λ�ú��ˑB(t��i)�M(j��n)�Мy����ʹ�Ô�(sh��)�W(xu��)ģ�ͺ�CAD �\(y��n)��(d��ng)����õ����^ȫ�����(y��n)�C�������I(y��)�C(j��)�����\(y��n)��(d��ng)�����о����зe�O���x��
�����C(j��)�����\(y��n)��(d��ng)�W(xu��)�ǙC(j��)���˼��g(sh��)����Ҫ��(g��u)�ɲ��֣����\(y��n)��(d��ng)������܉�E���ƺ��x�����̵���Ҫ���A(ch��)���\(y��n)��(d��ng)�W(xu��)�����о�������֪�C(j��)���˸��P(gu��n)��(ji��)���\(y��n)��(d��ng)׃����������(ĩ�ˈ�(zh��)��������)����������(bi��o)ϵλ�˵Ć��}��
1��CAD ģ���cD-H ����(bi��o)ϵ�Ľ���
����(1) PUMA560 �C(j��)���˵�CAD ��ģ
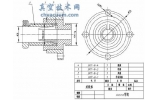
����PUMA560 �C(j��)�����əC(j��)��1 ��6 ��(g��)���(d��ng)�U����(g��u)�ɣ�����6 ��(g��)���D(zhu��n)�P(gu��n)��(ji��)��ʹ��AutoCAD ƽ�_�ṩ�Č�(sh��)�w��ģ����(sh��)�w���Ͳ����\(y��n)��ȹ��ܣ����Ժܷ���ؽ�������(g��)�U���Č�(sh��)�wģ�K(��)������(j��)����(g��)��(g��u)�����b���P(gu��n)ϵ��λ�óߴ�����{(di��o)���ÙC(j��)���˵ij�ʼ��B(t��i)������λ���P(gu��n)ϵ����D1��
����(2)D-H ����(bi��o)ϵ�Ľ���
�����C(j��)������(bi��o)ϵ(X0Y0Z0)�B�ڙC(j��)��1 �ϣ��麆��Ӌ(j��)�㣬����ԭ�c(di��n)O0ƽ�ƣ�ʹO0��O1�غϣ�������������(bi��o)ϵҎ(gu��)�t���������(d��ng)�U������(bi��o)ϵ���D2 ���^�����һ�N��
����PUMA560 �C(j��)���˗U������(bi��o)ϵ��ԭ�t�������D(zhu��n)��θi��Ť��αi���U�Lhi��ƫ��di 4 ��(g��)��(g��u)������(sh��)��������zi�Sȡ�U��i �c�U��i+1 �����S������xi�S�tȡ��������z �Ĺ��������U�Lhi����xi�S��zi-1�S��zi�S�ľ��x��Ҏ(gu��)���cxi�S����һ�µľ��x������ƫ��di����zi-1�S��xi-1�S��xi�S�ľ��x��Ҏ(gu��)���czi-1�S������һ�µľ��x������Ť��αi���@xi�S��zi-1�S��zi�S��λ�ƣ� Ҏ(gu��)����xi�S�����^����r(sh��)ᘷ���Ľ�λ�ƞ������D(zhu��n)��θi���@zi-1�S��xi-1�S��xi�S�Ľ�λ�ƣ�Ҏ(gu��)����zi-1�S�����^����r(sh��)ᘷ���Ľ�λ�ƞ�����
4���Y(ji��)�Z
����������PUMA560 �C(j��)���˵��\(y��n)��(d��ng)�W(xu��)�����CAD��ģ���c��(sh��)�W(xu��)ģ�ͣ�ͨ�^AutoCAD ����ʼ���\(y��n)��(d��ng)��ķ���͜y����ʹ�����┵(sh��)�W(xu��)ģ���cCAD ģ�ͷ�����λ�ú��ˑB(t��i)����õ����^ȫ�����(y��n)�C�����C(j��)�����\(y��n)��(d��ng)���ܺ��m(x��)�о��������зe�O���x��