�]�h(hu��n)늿�׃�������õ�(li��n)�Ϸ������
�����錍(sh��)�F(xi��n)Һ��׃���õ��]�h(hu��n)늿ز������������ܣ��о����ڸ����_(k��i)�P(gu��n)�y��Ƕ��ʽ���������]�h(hu��n)늿�׃���������Ĺ����C(j��)�����������ԡ������˻���AMESim��Һ������ģ�ͺͻ���LabVIEW�Ŀ�����������(li��n)�Ϸ���ķ����õ����]�h(hu��n)늿�׃��������ϵ�y(t��ng)��(du��)�����������Ȅ�(d��ng)�B(t��i)ݔ����̖(h��o)�ĸ��S푑�(y��ng)�������Y(ji��)�������]�h(hu��n)늿�׃�������Ì�(sh��)�F(xi��n)��Һ���õ��]�h(hu��n)׃�����ƣ��O�������Һ��׃���õĿ����`���ԡ�
��������
�������y(t��ng)׃�����������б�P(p��n)����ϵ�y(t��ng)���������^���(f��)�s�Ŀ����y�M�ͷ�����·��(g��u)�ɣ��@ʹ����Y(ji��)��(g��u)��(f��)�s�ӹ��y�ȸߣ��ҽo����ϵ�y(t��ng)����(l��i)���^��ķǾ������ء����҂��y(t��ng)׃�����y��ͬ�r(sh��)��(sh��)�F(xi��n)��(du��)���������������ʵĿ��ƣ�Ҳ��������(du��)ݔ����̖(h��o)(�牺����̖(h��o))�Ą�(d��ng)�B(t��i)���S푑�(y��ng)��
�������ˌ�(sh��)�F(xi��n)Һ��׃���õ��]�h(hu��n)���ƣ������������ƾ��Ⱥ��`���ԣ�һ�N���Ђ��������������ڸ����_(k��i)�P(gu��n)�y��Ƕ��ʽ���������]�h(hu��n)늿ر�ϵ�y(t��ng)�����˳���(l��i)����(gu��)������ʿ��(l��)�ȏS���Ƴ��˻��ڱ����y���]�h(hu��n)늿رîa(ch��n)Ʒ����(gu��)��(n��i)�㽭��W(xu��)���F�ݴ�W(xu��)���к���ԴҺ���Ȇ�λ��(du��)���ڸ����_(k��i)�P(gu��n)�y���]�h(hu��n)늿رõĽY(ji��)��(g��u)�Ϳ��Ʒ����_(k��i)չ��һ�����о�������Ԕ��(x��)ӑՓ���]�h(hu��n)늿�׃�������õĹ���ԭ����������(li��n)�Ϸ���ķ�����(du��)������������˷�������(du��)�M(j��n)һ���ĘәC(j��)�����ԇ�(y��n)����Ҫ��ָ��(d��o)���x��
1���]�h(hu��n)늿�׃�������õ�ԭ������
����1.1���]�h(hu��n)늿�׃�������õĹ���ԭ��
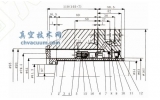
���������������]�h(hu��n)늿�׃�������õ�ϵ�y(t��ng)ԭ����D1��ʾ��б�P(p��n)�ɶ˷քe�B��һ��(g��)�����ף�����Ļ�����ͨ�߉����Џ�(f��)λ���ɣ������λ���ƻ�����;����Ļ�����������e�^����ǻ�Ӹ����_(k��i)�P(gu��n)�y�������_(k��i)�P(gu��n)�y�ɿ������l(f��)��PWM��̖(h��o)�M(j��n)�п��ƣ��Q�����M(j��n)����ƻ���ǻ���������Ķ���(sh��)�F(xi��n)б�P(p��n)��λ��λ�á������_(k��i)�P(gu��n)�y�Ŀ���������PWM��̖(h��o)��ռ�ձțQ����Ƕ��ʽ����������(j��)�����㷨����(sh��)�r(sh��)Ӌ(j��)�㲢����PWM����ռ�ձȡ��ǶȂ������Á�(l��i)�z�y(c��)б�P(p��n)�Č�(sh��)�r(sh��)�A��ֵ�������䷴���o���������Եó��õĹ�������;�����������Á�(l��i)�z�y(c��)�õij��ډ������������o�������Á�(l��i)�M(j��n)���]�h(hu��n)����Ӌ(j��)�㡣����(j��)�������ķ�����̖(h��o)��Ƕ��ʽ���������Եõ��õĉ�������������ֵ�������c�O(sh��)��ֵ�M(j��n)�б��^֮����ֵ����PID �㷨��ݔ�룬��ɉ������������ʵ��]�h(hu��n)���ơ�������Ҫ�Ĺ�����������B(t��i)�������ɳ�����ƣ������]�h(hu��n)늿رÿ��Ԍ�(sh��)�r(sh��)�،�(du��)������B(t��i)�M(j��n)�и�׃��������(du��)��(d��ng)�B(t��i)��ݔ����̖(h��o)�M(j��n)�и��S푑�(y��ng)�����⣬������߀����CAN�����ӿڣ����Է���ؽ�����λӋ(j��)��C(j��)�Ŀ���ָ�Ҳ���Ԍ��õĹ�����(sh��)��(j��)�l(f��)�͵������ϣ����㔵(sh��)��(j��)�ı����Լ���(du��)�õıO(ji��n)�ء�
![�]�h(hu��n)늿�׃�������õ�ϵ�y(t��ng)ԭ��D](/uploads/userup/1503/15130443Z61.jpg)
�D1 �]�h(hu��n)늿�׃�������õ�ϵ�y(t��ng)ԭ��D
����1.2������ԭ��
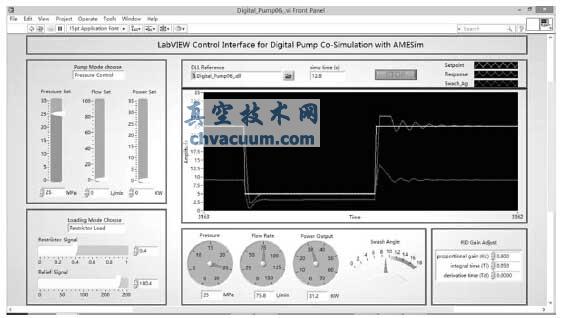
�����S��׃���������Љ������ơ��������ƺ��ʿ��ƵȲ�ͬ��׃�����ƹ��ܶ����Ԛw�Y(ji��)�ڌ�(du��)�������Ŀ��ƣ��]�h(hu��n)늿�׃����������ͨ�^(gu��)�����_(k��i)�P(gu��n)�y��(du��)б�P(p��n)�A�ǵ�λ�ÿ��Ɓ�(l��i)��(sh��)�F(xi��n)��(du��)�����Ŀ��ơ����IJ��õĸ����_(k��i)�P(gu��n)�y���λ��ͨ�y���M(j��n)��׃�������Ŀ��������������Ա�ʾ�飺
![�]�h(hu��n)늿�׃�������õ�(li��n)�Ϸ������](/uploads/userup/1503/1513064Q0A.jpg)
![�]�h(hu��n)늿�׃�������õ�(li��n)�Ϸ������](/uploads/userup/1503/15130ABJ9.jpg)
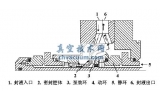
������(sh��)�F(xi��n)�˱��������]�h(hu��n)늿�֮�Ϳ�����Ɍ�(du��)���������ʵȅ���(sh��)�Ŀ��ơ���(d��ng)��̎�ں㉺�������������ߺ㹦�ʿ��Ơ�B(t��i)�r(sh��)����ϵ�y(t��ng)���F(xi��n)ؓ(f��)�d׃����ɔ_��ϵ�y(t��ng)��(hu��)�ڶ̕�����(d��ng)���{(di��o)����ص���(w��n)����B(t��i)������֮�⣬�����]�h(hu��n)늿رõĹ�������(sh��)��ģʽ�ɳ�����ƣ���˿��Է���،�(sh��)�F(xi��n)��(du��)��(d��ng)�B(t��i)ݔ����̖(h��o)�ĸ�ۙ푑�(y��ng)������ڂ��y(t��ng)׃����������`���Դ����ߡ��]�h(hu��n)늿رõĄ�(d��ng)�B(t��i)���ƿ�D��D2��ʾ��
![�]�h(hu��n)늿رõĄ�(d��ng)�B(t��i)���ƿ�D](/uploads/userup/1503/1513045B436.jpg)
�D2 �]�h(hu��n)늿رõĄ�(d��ng)�B(t��i)���ƿ�D
2������ģ�ͽ���
����2.1��Һ��ϵ�y(t��ng)����ģ��
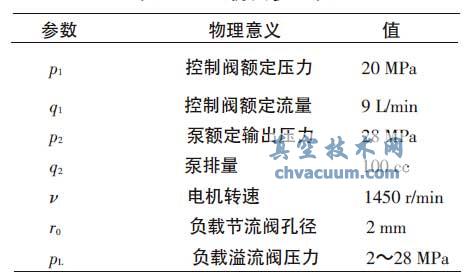
�����]�h(hu��n)늿ر�ϵ�y(t��ng)���Է֞����������w��б�P(p��n)�������y��׃�������Ȳ��֣���(du��)�@Щ���ַքe��ģ������ɱ�ϵ�y(t��ng)�����w���潨ģ������AMESim��Һ������ģ�����нӿ��Á�(l��i)�cLabVIEW�еĿ������M(j��n)�Д�(sh��)��(j��)�����γ�(li��n)�Ϸ��档����AMESim��Һ������ģ����D3��ʾ�����µ������Ξ�����_(k��i)�P(gu��n)�y��б�P(p��n)׃��ϵ�y(t��ng)���������ӿںͼ��dϵ�y(t��ng)ģ�͡���Ҫ�ķ��慢��(sh��)���1��ʾ��
![�]�h(hu��n)늿رõ�Һ������ģ�͈D](/uploads/userup/1503/15130514MH.jpg)
�D3 �]�h(hu��n)늿رõ�Һ������ģ�͈D
��1 ��Ҫ���慢��(sh��)��
����2.2��������ģ��
��������LabVIEW�Ŀ��������˙C(j��)������D4��ʾ��ԓ����ܛ���cAMESim��Һ������ģ���B��֮������ɉ�����������б�P(p��n)�A�ǵȅ���(sh��)�Ĕ�(sh��)��(j��)�ɼ�����(sh��)�F(xi��n)�]�h(hu��n)�����㷨����ɺ㉺�����������ͺ㹦�ʵ��o�B(t��i)���ơ����ГQ����(d��ng)�B(t��i)����ģʽ֮���Ԍ�(sh��)�r(sh��)�O(sh��)��ݔ��������ʹ��׃����ϵ�y(t��ng)��(du��)ݔ����̖(h��o)�Ą�(d��ng)�B(t��i)���S푑�(y��ng)��ܛ�������Ͽ����O(sh��)�ñò�ͬ�Ĺ���ģʽ����ͬ�Ĺ�������(sh��)�����ҿ��Ԍ�(sh��)�r(sh��)�O(ji��n)�y(c��)�����������ȅ���(sh��)���@�cһ��(g��)��(sh��)�H�ı�ԇ�(y��n)�_(t��i)�y(c��)��ϵ�y(t��ng)�O�����ƣ�����ȵ�ʹ�÷����N����ԇ�(y��n)��
�D4 LabVIEW ����ܛ������
����LabVIEW��һ�N�D�����Z(y��)�ԣ��c���ƽ�������(du��)��(y��ng)����һ��(g��)���Ƴ����c�ı��Z(y��)�Բ�ͬ����Lab⁃VIEW�еij����ԈD��(bi��o)�͔�(sh��)��(j��)������ʽ�ʬF(xi��n)�������O(sh��)Ӌ(j��)��������LabVIEW �������{(di��o)��AMESim ģ�͵�dll�ļ����Á�(l��i)���f��(sh��)��(j��)��Ȼ�����PID���߰�����]�h(hu��n)�����㷨��
3������Y(ji��)������
��������ᘌ�(du��)�]�h(hu��n)늿�׃�������õĹ���ģʽ�ͅ���(sh��)�ɳ�����Ƶ����c(di��n)����Ҫ�����䌦(du��)��(d��ng)�B(t��i)ݔ�뉺�����������ʅ���(sh��)�r(sh��)�ĸ��S푑�(y��ng)�������D5���D6�͈D7�քe���]�h(hu��n)늿�׃�������Ì�(du��)��׃���ĉ���ݔ�롢����ݔ�����ݔ��Ą�(d��ng)�B(t��i)���S푑�(y��ng)�������D5�Љ���ݔ���5��25MPa�ķ����������غ��½��ؕr(sh��)��푑�(y��ng)�������Ѕ^(q��)�e����������푑�(y��ng)�r(sh��)���ڰ�ȫ�����y�����ˉ��������^(gu��)28MPa�����Գ��F(xi��n)һ��(g��)����ƽ�ļ�塣�D6�е�����ݔ���50��100L/min�ķ�����̖(h��o)����Ҋ(ji��n)ϵ�y(t��ng)��(du��)������˺ܺõĄ�(d��ng)�B(t��i)���S���ɂ�(g��)߅�صĄ�(d��ng)�B(t��i)푑�(y��ng)�r(sh��)�g����0.1s�ԃ�(n��i)���D7�еĹ���ݔ��������10��50kW�ķ���������(du��)��(y��ng)��ϵ�y(t��ng)�������{(di��o)��������50��120L/min������ؓ(f��)�dϵ�y(t��ng)��(ji��)�����^С��ԭ����50kWݔ���ĕr(sh��)���Է�ֵ����28MPaݔ����
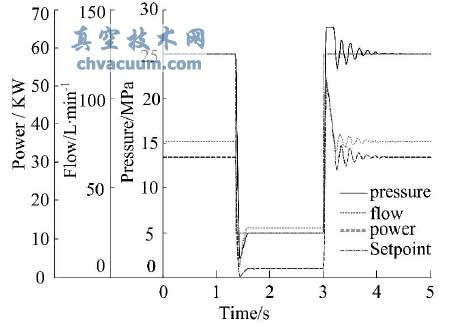
�D5 ����ݔ��ĸ��S푑�(y��ng)����
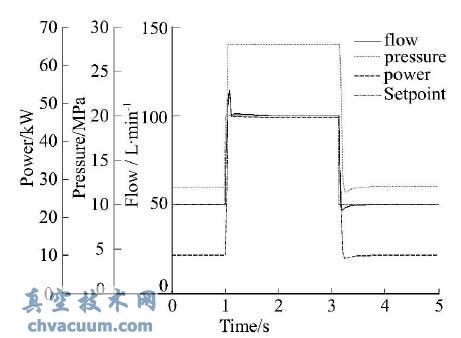
�D6 ����ݔ��ĸ��S푑�(y��ng)����
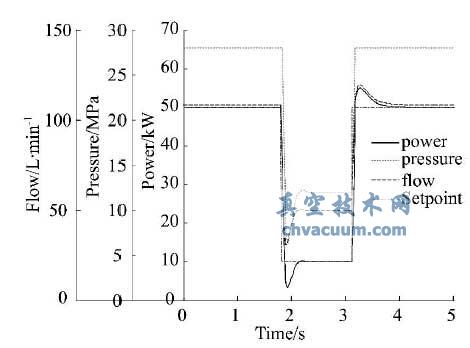
�D7 ����ݔ��ĸ��S푑�(y��ng)����
4���Y(ji��)Փ
�������Ľ����˻���AMESim��LabVIEW��(li��n)�Ϸ���ģ�ͣ��о��˻��ڸ����_(k��i)�P(gu��n)�y��Ƕ��ʽ���������]�h(hu��n)늿�׃�������á�(li��n)�Ϸ����ְl(f��)�]�˃ɿ�ܛ�����Ե����c(di��n)��ʹ�÷���ģ�����N����(sh��)�Hϵ�y(t��ng)������Y(ji��)���������]�h(hu��n)늿�׃�����ڌ�(sh��)�F(xi��n)�㉺�����������ͺ㹦�ʵij�Ҏ(gu��)����ģʽ֮�⣬߀���Ը���(j��)�O(sh��)����ݔ��?y��n)��?sh��)�M(j��n)�Є�(d��ng)�B(t��i)푑�(y��ng)����Ɍ�(du��)ݔ�������ĸ��S���O�������Һ��׃���õĿ����`���ԡ�