三維旋轉噴槍射流分析及機械和控制研究
原油儲罐機械清洗作業中布置在浮頂上的噴槍產生三維旋轉的射流,分別對罐底和罐頂進行沖刷,使沉積凝固的原油得以破碎和溶解,脫離所附著的罐壁表面,達到清洗的目的。筆者從機械清洗需要形成的射流軌跡入手,通過對結構、噴頭運動、齒輪傳動系統、氣動控制系統的分析研究,設計出具備特殊結構的三維旋轉噴槍使其能夠滿足清洗工程的需要。射流軌跡分析是已知噴槍需要達到的功能的情況下分析噴頭的運動模式。噴頭運動分析以射流軌跡分析的結果作為輸入條件,分析出結構上的幾何關系。齒輪傳動系統設計以運動分析為基礎,計算出噴頭自轉速度和與公轉軸線夾角速度之間的關系,并確定適當的結構和傳動比。氣動控制系統設計為傳動系統提供合適的動力,以及控制噴頭在一定的角度范圍內擺動。通過對以上關鍵技術的分析研究,設計出滿足原油儲罐機械清洗工程需要的三維旋轉噴槍。
1、引言
我國目前已經成為世界第一石油消費大國,石油的戰略和商業儲備能力近兩年里突飛猛進,據不完全統計已經投用和開始建設的儲存總量達到1 億噸以上,而且單臺儲罐的規格基本上都是5 ~ 10 萬m3,現在中石油某企業正在研究15 ~ 20萬m3 的儲罐。由于儲存的原油量大,且具有易燃、易爆、污染環境的特性,大型原油儲罐一旦發生事故,將造成嚴重的經濟損失和環境污染,而且可能釀成重大火災及爆炸事故。為了確保儲罐完整性及其使用安全,在原油儲罐的實際運營中,需要定期停產檢修。中國石油天然氣行業標準SY/T 5921—2002 規定: 新建油罐第一次開罐檢修的時間最長不超過10 年,第二次及以后開罐檢修周期一般為5 ~ 7 年。原油儲罐在檢修前必須清洗干凈,而且不能造成資源浪費和環境污染,還要確保清洗過程的安全,因此原油機械清洗系統應運而生。而本文所探討的三維旋轉噴槍正是該系統的核心設備。原油儲罐機械清洗作業中布置在浮頂上的噴槍產生三維旋轉的射流,分別對罐底和罐頂進行沖刷,使沉積凝固的原油得以破碎和溶解,脫離所附著的罐壁表面,達到清洗的目的。從機械清洗需要形成的射流軌跡入手進行分析,應用運動學原理及機械傳動理論和噴射技術等知識,可以設計出滿足原油儲罐機械清洗工程所需要的噴槍結構,產生所需要的三維旋轉射流。
2、射流軌跡分析
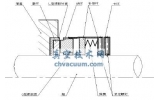
原油儲罐機械清洗作業中將噴槍安裝在浮頂的支腿套管中,噴頭處于浮頂與罐底之間。噴頭旋轉的軌跡如圖1 所示。

圖1 噴槍射流軌跡
從清洗的目的出發需要有2 種區間清洗模式( 底部清洗模式和頂部清洗模式) 以及全方位清洗模式。
真空技術網(bjjyhsfdc.com)認為底部清洗模式: 由于浮盤落底后從浮頂到罐底的距離很短,一般是1 ~ 2m,所以當噴頭與垂直方向所成的夾角很小時( 45°以內) ,射流在底部覆蓋的范圍也很小,這部分很小的面積可以由布置在相鄰位置的其它噴槍所產生的射流覆蓋到或在全方位清洗模式時進行清洗。由此,把噴頭向下擺動的極限位置設為45°是比較合理的。當噴頭與垂直方向的夾角從45° 向上擺動時,需要噴頭同時繞垂直軸線做旋轉運動,則噴頭噴出的射流在底面上形成從內逐漸向外擴展的螺旋形軌跡,在夾角小于90°的范圍內由于射流直射在底面上有非常好的沖刷清洗效果,但為了使射流能打到盡量遠的位置,應將噴頭向上擺動的極限位置設在105°,此時射流為拋物線,雖然打對底板的打擊力減弱,但射程是最遠的,同時布置在側壁附近的噴槍可以對側壁形成很好的清洗效果。由此得出底部清洗模式時清洗軌跡是45° ~ 105°范圍內的螺旋形軌跡。
頂部清洗模式: 底部清洗模式時的擺角上極限為105°,為了清洗時盡量覆蓋到所有的區域,同時105°開始向上舞動,射流即可打到頂部,所以頂部清洗模式的下極限位置定為105°。從105°開始噴頭向上擺動,射流在頂板上形成由外向內的螺旋形軌跡,但由于結構上的限制噴頭與噴槍管軸線不可能形成180°,因為要實現噴頭三維旋轉需要噴頭與噴槍管通過斜面配合,噴頭繞斜面的軸線擺動和同時繞噴槍管的軸線旋轉。所以當噴頭繞斜面的軸線轉過180°時噴頭與噴槍管軸線所成夾角為135°,不過由于噴頭與頂板距離非常近,135° ~ 180°范圍內為一個非常小的面積,通過合理的噴槍布置,可以由相鄰的噴槍清洗到這部分面積。所以頂部清洗模式時,清洗軌跡為105° ~ 135°范圍內的螺旋形軌跡。
3、三維旋轉噴槍結構設計
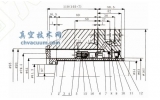
由以上對原油儲罐機械清洗作業中噴槍所需要形成的清洗軌跡的分析,設計噴槍的結構如圖2 所示。

圖2 三維旋轉噴槍結構
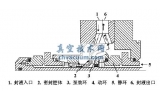
三維旋轉噴槍由氣動馬達、減速機、齒輪傳動系統、角度指示器、槍管、外軸、內軸、噴頭以及氣動控制系統等組成。氣動馬達輸出的動力經減速機減速后由齒輪傳動系統分別傳遞給外軸和內軸,外軸形成噴頭繞噴槍軸線的旋轉運動———公轉,內軸的旋轉形成噴頭繞自身軸線的旋轉運動———自轉,或由氣動控制系統控制噴頭在一定角度范圍內擺動。
7、結語
原油儲罐機械清洗工程中三維旋轉噴槍是最終的執行機器,如何形成滿足清洗需要的清洗軌跡并實現具有在一定角度范圍內反復清洗和全方位清洗模式的功能并能在不同模式間切換是關鍵的技術難點。筆者對清洗軌跡和噴頭的運動進行了分析,并對總體結構、齒輪傳動系統、氣動控制系統的設計進行了簡要的闡述。論述了清洗噴槍三維旋轉射流的成因。設計的三維旋轉噴槍已成功應用于原油儲罐機械清洗工程,如新疆吐哈油田、鎮海國家石油儲備基地原油儲罐的清洗工程等,驗證了分析和設計是科學的。