�ܷ�h(hu��n)���湲�۽�����D��ķ��������о�
�������ڷ�����Փ������MATLAB �_�l(f��)�ܷ�h(hu��n)���漤��۽�����D����ξS��(sh��)Ӌ�㼰������������Sierpinski��̺�������Ӌ��Y(ji��)���M(j��n)�И�(bi��o)����Ӌ�㲻ͬ�ָ��ֵ�µĈD����ξS��(sh��)���o��һ�N�ָ��ֵ���xȡ�������о��Y(ji��)������: �O(sh��)Ӌ�_�l(f��)�ķ��ξS��(sh��)Ӌ���������^�ߵĜ�(zh��n)�_��; �D��ָ��ֵ���xȡ���ܷ�h(hu��n)������ξS��(sh��)��Ӌ������ҪӰ푣��o���ķָ��ֵ�xȡ��������ʹ�D���ֵ��Ч����ѣ�ʹ����D�������̶ȵط�ӳ�ܷ�h(hu��n)������ò�ķ����������Ķ�����ܷ�h(hu��n)������ò���������ľ��_�ȡ�
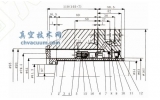
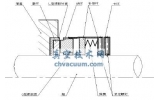
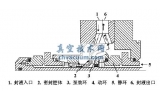
�����ܷ�h(hu��n)�������ò�ǙCе�ܷ�ӹ������^���б��F(xi��n)��������Ҫ�����������Cе�ܷ��Ħ�����Ժ��ܷ����Ծ�����ҪӰ푡��о��ܷ�h(hu��n)Ħ�����ֲڱ���Ĺ������ԣ����_����Ħ�����ı�����ò�����˽��ܷ�����g��й©ͨ����r���Լ�����Cе�ܷ����o�h(hu��n)���|�����ĥ���|(zh��)��������Ҫ�����x��
����20 ���o(j��)70 �����������(sh��)�W(xu��)��Mandelbrot��ʽ�������(chu��ng)����һ�N̽����Ȼ���(f��)�s�ΑB(t��i)�Ĕ�(sh��)�W(xu��)��֧———���ΎΌW(xu��)�����Ύ��܉��ڸ���Ӵ�����̵��������о��ͷ����ձ���ڵ��s�y�o�µġ���Ҏ(gu��)�t�ġ��S�C����Ȼ�F(xi��n)����Ħ��ĥ�p�I(l��ng)�������������Փ���F(xi��n)�ˌ�Ħ�����ֲڱ�����ò�ĿƌW(xu��)�Ķ����������Ķ��Ƅ��˙Cе�ܷ������ò�c̽���ܷ�й©ͨ�����о�����һЩ���ڷ�����Փ�ęCе�ܷ�����о��У�������W-M ��M-B ����(sh��)��������ģ�M�ܷ���棬ͬ�r���ù����V���ͽY(ji��)��(g��u)����(sh��)�����о�݆�������ķ������ԣ����Ǻ���(sh��)ģ�Mֻ�ܵõ��y(t��ng)Ӌ���x�ϵ���ò��������ȫ����ӳ�ܷ�����й©ͨ����r��������Ò���D����о��ܷ�������ò�����;�����Ҫ�����x��������һЩ���ڒ���D��ķ��������о��У���Y(ji��)�ψD��̎�����g(sh��)���D���M(j��n)���A(y��)̎����Ȼ������Ӌ�оS��(sh��)�ȷ�ʽ��ȡ��ֵ����D��ķ��ξS��(sh��)��Ȼ����ֵ���^�����ֵ���xȡ���D����������F(xi��n)�ͷ��ξS��(sh��)Ӌ�������Ҫ��Ӱ푣����xȡ�ķָ��ֵ��(y��ng)�����̶ȵ،��ܷ�������D��ķ����������F(xi��n)������
�����������ߔM�����ܷ�h(hu��n)����ļ���۽�����D��ͨ�^MATLAB ����Ӌ���ܷ����ķ��ξS��(sh��)��ӑՓ��ֵ���^���зָ��ֵ�xȡ�����ξS��(sh��)��Ӱ푣��o��һ�N�D��ָ��ֵ���xȡ������ͻ���D����������������Ķ����ܷ�h(hu��n)����ķ��α����ṩһ�N���١����_���·�����
����1������MATLAB �ķ��ξS��(sh��)�㷨�O(sh��)Ӌ
�������ξS��(sh��)�Ƿ��Ύ���Փ������Ҫ�Ļ�������֮һ��Ŀǰ�ѽ�(j��ng)�кܶ�S��(sh��)�Ķ��x����Ҫ����Hausdorff�S��(sh��)��Ӌ�оS��(sh��)(CBD) ������Ӌ�оS��(sh��)�����S��(sh��)�ȡ�Hausdorff �S��(sh��)�Ƿ��Ύ���Փ�Ļ��A(ch��)�������f���Ύε���Փ�wϵ�ǽ������@һ���A(ch��)֮�ϣ�����Hausdorff �S��(sh��)ֻ�m�Ϸ��Ύε���Փ�ƌ�(d��o)��ֻ��ͨ�^�����ķ����@��һС�Ҏ(gu��)�t�ļ���(sh��)�W(xu��)���ε�Hausdorff�S��(sh��)���������H��(y��ng)��������ķ��ξS��(sh��)��Ӌ�㆖�}�o�ܞ������b�ڴˣ��˂������Ӌ�оS��(sh��)�ĸ������Ӌ�оS��(sh��)�������xֱ�^�������M(j��n)�г���Ӌ�㣬��˵õ��ˏV���đ�(y��ng)�á�
����1.1��Ӌ�оS��(sh��)��ԭ��
�����O(sh��)A ��Rn ���g������ǿ��н��Ӽ�����������һ��r>0��Nr(A) ��ʾ�Á����wA ����߅�L��r ��n�S���ӵ���С��(sh��)Ŀ���������һ����(sh��)DB��ʹ�î�(d��ng)r→0 �r����
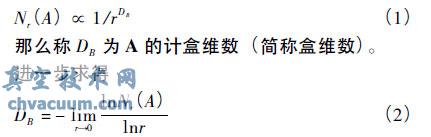
����Ӌ�оS��(sh��)�@����ʽ�Ķ��x�ڌ��H���ЏV���đ�(y��ng)�á���Ӌ��һ��ƽ�漯A ��Ӌ�оS��(sh��)�r�����Ԙ�(g��u)��һϵ��߅�L��r �������Σ�Ȼ��Ӌ�㲻ͬr ֵ�ĺ����cA �ཻ�Ă���(sh��)Nr(A) �� �@���S��(sh��)�Ǯ�(d��ng)r→0 �r��Nr(A) ���ӵČ���(sh��)���ʣ����߿����ɺ���(sh��)lnNr( A) ������lnr �D��б�ʵ�ؓ(f��)ֵ����Ӌ��
����1.2�������O(sh��)Ӌ
�����D����Ӌ��C�����Ծ�ꇵ���ʽ�惦��һ���L�Ȟ�M �����أ����Ȟ�N �����صĈD���Կ�����һ��M×N �ľ�ꇣ���ꇵ�ÿһ��Ԫ�ش���һ�����أ�Ԫ�ص�ֵ�������c�ɫ������ɫ�����ü���۽��@�õ��ܷ�h(hu��n)����D����RGB ��ʽ���o��ֱ���M(j��n)��Ӌ�оS��(sh��)��Ӌ�㣬�����Ҫ���D���M(j��n)���A(y��)̎���������Ҷ�׃�Q��ƽ���V��������ȣ����xȡһ�����m�ķָ��ֵ�����D���ֵ�����@�Ӿ͌��D��̎����ֻ����0 (��϶) ��1(���w�Ǽ�) �Ķ�ֵ��ꇡ�����(j��)Ӌ�оS��(sh��)��ԭ��������ͨ�^MATLAB ��������Ӌ��Ӌ�оS��(sh��)�����E���£�
����(1) �xȡ��ֵ�����ܷ�h(hu��n)����D�����䔵(sh��)ֵ����xֵ�o׃��H��
����(2) �ò�ͬ߅�L�ߴ�������κ��ӌ����H �M(j��n)�и��w���y(t��ng)Ӌ�ڲ�ͬ�ߴ�r �°���Ŀ��(bi��o)����(0—��϶) �ĺ��Ӕ�(sh��)��Ӌ�딵(sh��)�MNr�У�
����(3) ���p����(sh��)����(bi��o)��������С���˷���(lnr��lnNr) �M(j��n)�ДM�ϣ��õ�ֱ��б�ʵ�ؓ(f��)��(sh��)����D���Ӌ�оS��(sh��)��
������������̈D��D1 ��ʾ��
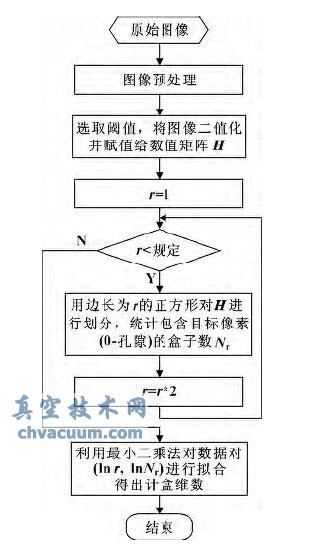
�D1 MATLAB Ӌ��Ӌ�оS��(sh��)�������̈D
����1.3��������C
����������C�O(sh��)Ӌ��������_�ԣ�����5��Sierpinski��̺�����(bi��o)���D��Ӌ��Y(ji��)���c��(bi��o)��(zh��n)�Y(ji��)���M(j��n)�Ќ��ȡ����Կ��������ĵ�Ӌ��Y(ji��)���c��Փ�S��(sh��)�����`��dz�С���f�����������O(sh��)Ӌ�ij����ǿ��еģ�ͬ�rҲ���кܸߵľ��_�ȡ�
2���Y(ji��)Փ
����(1) ����MATLAB �D��̎�����Y(ji��)�Ϸ��εĻ�����Փ���O(sh��)Ӌ�_�l(f��)�˻���MATLAB�ķ��ξS��(sh��)Ӌ�������������Sierpinski��̺�M(j��n)�И�(bi��o)������˳���Ŀ����Ժ͜�(zh��n)�_�ԡ�
����(2) �ָ��ֵ���xȡ�����ξS��(sh��)��Ӌ�������ҪӰ푣��S���ֵ�������ξS��(sh��)���w�ϳ���u�����څ�ݣ��o���ķָ��ֵ�xȡ�ķ������܉�ʹ�ܷ�h(hu��n)����D���еĿ�϶�Y(ji��)��(g��u)��ر��F(xi��n)����������˷��ξS��(sh��)Ӌ��ľ��_�ȡ�
����(3) �ܷ������ò���и߶ȵ������������������ܷ���湲�۽�����D��Y(ji��)�Ϸ�����Փ�����Ԍ��F(xi��n)���ܷ������ò�Ŀ��١���(zh��n)�_�Ķ����������@���ڽ�ʾ�ܷ�����й©ͨ��������Ҫ�����x��