���늻��t�Q��ϵ�y(t��ng)�y������Ӱ����\��
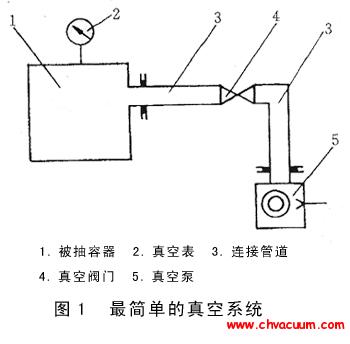
��������ͨ�^�����bʽ늻��t늘O�Q��ϵ�y(t��ng)�ĽY(ji��)��(g��u)��������������ԇ�Q���L�D�������������y�ܵđ�(y��ng)��������늘Oϵ�y(t��ng)ԭʼ��������(sh��)P0 ֵ���`��ֵΔF��������㷨�ṩϵ�y(t��ng)ԭʼ����(sh��)������ϵ��(sh��)Ӌ������(j��)�������ۻ��^����늘O���\�ӡ���|�Ĕ[�Ӽ�x-y �{(di��o)���C��(g��u)���y�����ȵ�Ӱ��M���˷��������Y(ji��)��늻��t�O(sh��)Ӌ���{(di��o)ԇ�^���Б�(y��ng)ע�����헣����܌����H���a(ch��n)�ṩһ����ָ��(d��o)���x��
1������
�����S���҇�����Ժ�늘O늻��t(���Q��늻��t)������������ߣ���λ늻��t�O(sh��)������S��ij��F(xi��n)��Ȼ���ֵ��O(sh��)���۟������H����늉������Ԅ��۟�ˮƽ�����F(xi��n)���˺����ٺ����۟����ջ���ȫ��ˇ�^�̵��Ԅӻ������P(gu��n)�I�c���ڴֵ��O(sh��)��]���O(sh��)�÷Q�ؙC��(g��u)�����F(xi��n)���˺����ٺ��۟���ˇ�^�̵��Ԅӻ��������ٺ��۟���ˇ�^���Ԅӻ����H���C���۟��a(ch��n)Ʒ���|(zh��)��(�磺�p��ƫ������������)����������ˮa(ch��n)Ʒ��������(�磺�p����β���s����)��Ҳ���C�˰�ȫ���a(ch��n)���Q��ϵ�y(t��ng)���ھ��y������(�Դ�������������Ŀ��ơ��y�����Ȳ��ڱ���ӑՓ����������(n��i))�Q�������ٿ��ƾ��ȡ��ھ��̿����㷨������Ҫ�ɼ�늘Oϵ�y(t��ng)ԭʼ��������(sh��)P0 ֵ�����y��������`��ֵΔF��������㷨�ṩԭʼ����(sh��)���^������ϵ��(sh��)�_���ṩӋ������(j��)��
2��ԇ�Q���L�D���P0���`��ֵΔF
����늻��t늘O�Q��ϵ�y(t��ng)��һ�N��(f��)�s�����S���әC��(g��u)��P0 ֵ���H����늘O�U��֧�ܼ����ٙC��(g��u)���oֹ��������(sh��)��߀������ˮ����|�����ӵ�ˮ�ȄӅ���(sh��)������ڌ��H���a(ch��n)�в�����ͨ�^�μ��y�������P0 ֵ��F0 ֵ�����˱��ڷ������^�죬�ڲ�Ӱ���������r�º����˵ęC��(g��u)���D1���Q������9 ��ԓ�C��(g��u)�ĺ���Ԫ����Ŀǰ�ֲ�����葪(y��ng)׃ʽ���������乤��ԭ���ǂ�������������r��ճ�N�ڏ����w�ϵ���葪(y��ng)׃Ƭ�l(f��)��׃�Σ�ʹ�����l(f��)��׃�����ٽ�(j��ng)����(y��ng)�Ĝy���·�Ѿ������׃���D(zhu��n)�Q��늉��������̖���Ķ��������D(zhu��n)׃?y��u)�y����̖����˿����J��������DŽŶ�ϵ��(sh��)�ܴ�׃�κ�С�ď���Ԫ�������y��8 �DZ�����ա��Ŷ�ϵ��(sh��)�^С���ܷ⏗���w��

1. ��(n��i)ˮ����|;2. ��ˮ����|;3. 늙C;4.X��Y �{(di��o)���C��(g��u);5. �z��;6.֧�ּ�;7. ���ܷ�;8. ���y��;9. �Q������;10. 늘O�U;11.�����;12.��(d��o)��݆
�D1 �Q�ؙC��(g��u)
�����O(sh��)��ԓ�C��(g��u)��늘O�U10 ��������m��֧�ܼ����ٙC��(g��u)(������|�����ӵ�ˮ)��������M����ϵ�y(t��ng)��������P0=(M+m)g���������@ʾ�d���؞�Q0�����y��֧������F0���t�ڷ�����o�B(t��i)�£�
P0=Q0+F0 (1)
����ʽ�У�Q0 ������������9 ��֧�������ڂ����������y�������ڏ��Է�����(n��i)���������ػ��˶��ɣ��t�������Ͳ��y�ܑ�(y��ng)��������(y��ng)�龀�������������҂�ͨ�^�ڷ�����o�B(t��i)��ԇ�Q�����P0 ֵ��
����(1)���Ȝʂ������������Δa1��Δa2��Δa3 �������dԇ�Q�K������ע�����;�̖;
����(2)ӛ�δ���d������P0=(M+m)g �����·Q�������@ʾֵQ0;
����(3)ӛ䛼��d��a1����(P0+��a1)�r�Q�������@ʾֵQ1;��Ӌ���Q1=Q1-Q0���Դ���ƣ�������(y��ng)��á�Q2����Q3;
6�������Ϳ��Y(ji��)
����늻��t�÷Q��ϵ�y(t��ng)�����H�ϳ�ֿ��]���۟��r���܄ӑB(t��i)�Q�أ����ܝM��늘O�UX��Y �{(di��o)������Ҫ�������Y(ji��)��(g��u)������(f��)�s����(n��i)�����������c�^�ࡣ����(j��)���ϵķ���ӑՓ�͌��H��(j��ng)������¿��Y(ji��)��Ҋ��
����1�������Ќ�ϵ�y(t��ng)ԭʼ��������(sh��)�w��r����(y��ng)���]����ՠ�B(t��i)������P ֵ����w�ㅢ��(sh��)��������(y��ng)���β�ȡ������µ�Q0 ֵ�c�������֮������w��ֵ���Ա�صׄh�����y�ܳ�ʼ֧���oϵ�y(t��ng)ԭʼ����(sh��)�w�㎧�����`�
����2���o�B(t��i)�ă�(n��i)������Ӱ푷Q�ؽY(ji��)�������DŽӑB(t��i)�ă�(n��i)������늘O�U�����\�ӣ�ˮ����|�[�ӵȣ���ֱ��Ӱ푷Q�ؽY(ji��)������˱M�������(n��i)���C��(g��u)�����\�ӣ���ӣ��[�ӵȬF(xi��n)����F(xi��n)��
����3�������o�B(t��i)��׃���������Q�ص�Ӱ푣����ͨ�^�Y(ji��)��(g��u)�O(sh��)Ӌ�����b���M���������h������늾���|��ˮ�ܣ���·�ȱ�횲�ȡ����Ғ췽ʽ�����ƄӵIJ��ֲ����c����Ħ�����|��
����4�����Ƅӵă�(n��i)��ˮ����|���Ƅӕr���䏝���돽һ�£����ó��F(xi��n)�۹ܻ����c���������|����|��(n��i)ˮ��Ҫ��(w��n)��������ˮ������(w��n)��ɹ܃�(n��i)ˮ��׃����Ӱ푿��ƾ��ȡ�