���|ʽ�����ȡ���g(sh��)�о��F(xi��n)���c�l(f��)չڅ��
�������ďĽ��|ʽ�����ȡ�ļ��g(sh��)������l(f��)�������˽��|ʽ������P���O(sh��)Ӌ(j��)Ҫ�����Ҫ�Y(ji��)��(g��u)��ʽ���U���˽��|ʽ�����ȡ���g(sh��)�ɷǽ��ٲ��ϳ�Ҏ(gu��)���P���Π����m��(y��ng)���˹����Բ��Ϸ������P�İl(f��)չ�v�̣��о��������ȡ���a(ch��n)���������ⲿؓ(f��)��Դ���������P׃�θ�׃��(n��i)�ݷe�����P���σ�(y��u)���ȶ�N�����İl(f��)չڅ�ݡ��S���о�������ͼ��g(sh��)���M(j��n)�������������¼��g(sh��)���·������܃�(y��u)�����P�Y(ji��)��(g��u)������(qi��ng)��ȡЧ�����Ƅ�(d��ng)���|ʽ�����ȡ���g(sh��)������r�m��(y��ng)�����Π�?yu��n)A�֡���Ч��(ji��)�ܵȷ���l(f��)չ��
�������|ʽ�����ȡ���g(sh��)�V����(y��ng)���ڹ��r(n��ng)�I(y��)���a(ch��n)�����������У�����ؓ(f��)����A�ֹ��������гɱ��������Y(ji��)��(g��u)���Ρ�ʹ�÷���ȃ�(y��u)�c(di��n)�������ȡ�Ĉ�(zh��)������������P������ؓ(f��)�������ȷ��������P��(n��i)�a(ch��n)��һ������նȣ��Ķ������������ڰ댧(d��o)�w���I(y��)�У�����������P�@��ܡ����b�еȹ������������ݔ�͡��Ԅ�(d��ng)�b��ȹ�����ʳƷ���a(ch��n)�c�ӹ��У�������P�\(y��n)���c(di��n)���Ϲ���ʳƷ�����˹�����ȫ�l(w��i)������Ч�������d�ęC(j��)���˼��g(sh��)�I(l��ng)�������C(j��)���˰��b��������P���p�ɵ������ڸߌӽ������棬����(w��)�͙C(j��)����ĩ�˵�������P�t�����(w��)��(du��)����ٰ�ȫ����ȡ�������Ʒ��������P��(sh��)�F(xi��n)���ԊA�֣���(du��)�������p��С�����а�ȫ���ɿ����r(ji��)��������p�㡢��(ji��)�ܵȃ�(y��u)�c(di��n)�����≺�(q��)��(d��ng)�ĸ�����Ը����ڌ�(sh��)�F(xi��n)�����Y(ji��)��(g��u)���������õ�ǰ�������ďĊA�ֵ�������l(f��)�������˽��|ʽ�����ȡ���g(sh��)���о��F(xi��n)�չ����l(f��)չǰ����
1���A������
�����A����������ɂ�(g��)���棬һ�����P���m��(y��ng)������Π�c�����Ч�N�ϣ�һ���ṩ�ɿ�����նȡ����|ʽ�����ȡ���g(sh��)���Ԅ�(d��ng)�������͙C(j��)�����ṩ�˱�������ՊA�ַ����������a(ch��n)���g(sh��)���M(j��n)����(du��)�����ȡ���g(sh��)����˸��ߵ�Ҫ�A�ֹ����h(hu��n)��څ�ڶ��ӻ������磬���̽��������̎��������Ҫ�m��(y��ng)ˮ�h(hu��n)�������g̽�y�t��Ҫ�m��(y��ng)����h(hu��n)�����������a(ch��n)�����Π�Ķ�Ԫ����Ҫ�A�������m��(y��ng)��N�����Π���(hu��)����(w��)��������࣬��Ҫ�������ṩ�������(w��)�ęC(j��)���ˣ����@Щ�C(j��)�����Ƿ�����`��ɿ��ĊA��ĩ�ˣ����Ӱ푷���(w��)��Ч�������⣬ȫ������Դ��ȱ��ʹ�ù�(ji��)�s��Դ�ɞ�������������@Щ��Ҫ���ʹ���|ʽ�����ȡ���g(sh��)������r�m��(y��ng)�����Π�?yu��n)A�֡���Ч��(ji��)�ܵȷ���l(f��)չ��
2�����|ʽ�����ȡ���g(sh��)�о��F(xi��n)��
����2.1��������P�Y(ji��)��(g��u)��ʽ
����������P����|ʽ�����ȡ��ĩ�ˈ�(zh��)��������Ҏ(gu��)���P�IJ��Ϟ鶡�����z�������z���۰������������z�ȏ����^�õķǽ��ٲ��ϣ��Y(ji��)��(g��u)��ʽ����ƽֱ�͡���͡��L(f��ng)���͵ȣ����ɸ���(j��)�����ĽY(ji��)��(g��u)�ߴ猣�T�O(sh��)Ӌ(j��)�ͻ�������P��ᘌ�(du��)�F(xi��n)��ؓ(f��)�����P�Ą��Ⱥ��Π���{(di��o)���������Ć��}������(n��i)���о��ߌ�(du��)���P���|(zh��)���Π��M(j��n)�����о���̽����ͨ�^�����P�B��̎�O(sh��)Ӌ(j��)���_�B��������׃���_�B�����ď��Ժ��Π���{(di��o)��(ji��)���P�Ą��Ⱥ͊A������棬���m��(y��ng)������l����Ҫ�D1 �����qʽ���P�����P���m��(y��ng)������������ăAб�������D(zhu��n)��(d��ng)�����P�w�ϵij�����ͨ�^؞����(ji��)�Ŀף��c���b����(ji��)�˲������P��ͨ��
�������چ�(g��)���P�ṩ�����������ޣ��ڌ�(sh��)�H�\(y��n)���г����ö���(g��)���Pһ�����İ��b��ʽ���~�i�Ȱl(f��)����һ�N�����ˑB(t��i)�����z�y�����������m��(y��ng)������ؓ(f��)������ģ�K(�D2)��ͨ�^�A�ǂ������y������ģ�K����(du��)���������λ�ú��ˑB(t��i)��ͨ�^���x�������y��Ӌ(j��)������P���c���������g�ĊA�Ǻ;��x���Ķ��{(di��o)���b�õ�λ�Å���(sh��)�����õ��m��(y��ng)�����档
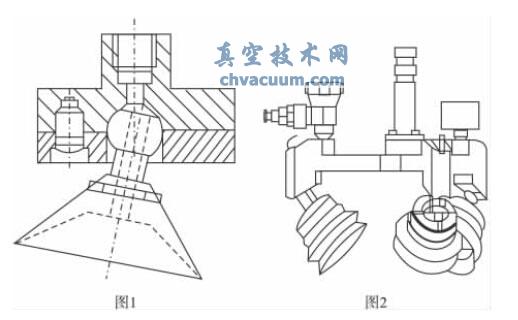
�D1 ���qʽ���P�Y(ji��)��(g��u)ʾ��
�D2 ���������m��(y��ng)ؓ(f��)������ģ�K
�����O�\ɽ�������˚��(d��ng)�����P�����C(j��)����(�D3)������(g��)���P�ṩ�˸���������档�c�D2 ��ʾ�b�ò�ͬ�������P֮�g�����������(q��)��(d��ng)���B�ӣ��܌�(sh��)�F(xi��n)һ��������(n��i)�ď������������P֮�g������(du��)λ�ÿ����S�����(q��)��(d��ng)���ď�������׃����˿��Ʋ��Ը��麆�Ρ�
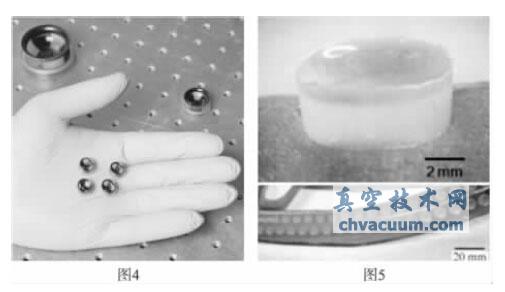
�D3 ���(d��ng)�����P�����C(j��)����
����2.2�������ȡ���a(ch��n)������
���������Pǻ�҃�(n��i)�Ě��w��ȥ���Ķ��a(ch��n)��ؓ(f��)����������������A(ch��)����ȡ���a(ch��n)����ʽ���@�N������ǰ�������P������w�o�ܽ��|��ʹ���Pǻ�����]��ͨ�^���P��(du��)���w���N�����a(ch��n)�����]ǻ�ң�������ձ���������հl(f��)��Ԫ���a(ch��n)����ա�
����ᘌ�(du��)���P��ȡ������(d��ng)�B(t��i)�^�̵����c(di��n)������ʹ���P�Ĺ�������ȫ�ɿ������t�A���ڌ�(du��)���P�ɂ�(g��)����λ�������M(j��n)���o��(d��ng)�B(t��i)�����ͱ��^�Ļ��A(ch��)�ϣ���������P���O(sh��)Ӌ(j��)��(y��ng)���ṩ���ƌW(xu��)������ȫ���O(sh��)Ӌ(j��)����(j��)�����ȇ��Ȟ��˱��C�����ȡ�����O(sh��)Ӌ(j��)�˶���������P����һ�M������У���(d��ng)������������ڿ՚�й©���з��]��������������������������ṩ�C(j��)�������������������������(du��)��ͬ�ı����M(j��n)����������(sh��)�(y��n)�����Мϲ۵ı��棬���������õ�С����ҵ�ؓ(f��)�����ܽ�����ֻ��ؓ(f��)���Ե͡�
3�������ȡ���g(sh��)�l(f��)չڅ��
����3.1���������P
�������ڳ�Ҏ(gu��)���P��ᘌ�(du��)�ض��Ĺ���Ҫ���m����ƽ���⻬��ƽ�棬�m��(y��ng)�Ĺ����Π�N��١������m��(y��ng)��N�����ĊA�������ں���ܛ�w�����`�У� ����(n��i)��W(xu��)�ߌ�(du��)�������P�M(j��n)�����о���Frank W Grasso �ȷ��������~���P�����c(di��n)����ָ��������˹����P��횝M������(g��)���ܣ�������©����Y(ji��)��(g��u)�ṩ�����ܷ����m��(y��ng)����α��棻�߂��˹����P�Y(ji��)��(g��u)���Ԯa(ch��n)����������ؓ(f��)�������ⲿ����ʹ�ñ������ı������S�C(j��)е���������D(zhu��n)��
�������������÷����W(xu��)ԭ�����������ԭ���������N��������©�����P�Y(ji��)��(g��u)ģ�͞���A(ch��)���Y(ji��)�����~���Pƽ�л���Ҏ(gu��)�t���ֵ����c(di��n)���������ڷ�����Ԫ�w�ľ��β��ֻ������β���Ҏ(gu��)�ɵķ����S�C(j��)݆̥����ģ�͡�ͨ�^���W(xu��)������̥�����Pʽ���y�^���c����l(f��)����Ч�������ɴ_���ṩ�����������������܇�ڱ����ϵķ������������ǣ���?y��n)����~���P�ļ���M����(sh��)Ŀ���o����M�����������S�Y(ji��)��(g��u)�������˹��ӹ��y���^�������ƌW(xu��)���Ï�(f��)�ϲ���3D ��ӡ���g(sh��)�����˹����P��Ʒ��ÿ��(g��)���Pֻ��ָ���w��С(�D4)����ʹ���@�ӵ����P��ꑵ����M(j��n)����������(sh��)�(y��n)���ƌW(xu��)�҂��A(y��)�y���@�ӵ����P��ˮ��ʹ�Õr(sh��)���ܿ����M(j��n)һ����������?y��n)�ˮ�����ṩ����ĉ������?du��)�ڙC(j��)���˵Ĉ�(zh��)��ĩ�ˣ����������~���P�ǘӵ������b�ã���Ҫ���������������~�M�����˹������Ԫ�����g(sh��)�y���^�ߣ�Ҳ��Ҫ�^�ߵļӹ��ɱ��������ҵ�����(sh��)�F(xi��n)�ĽY(ji��)��(g��u)��Jingping Hou ���о������~���P�ķ����Y(ji��)��(g��u)���ԣ����Դ˞���A(ch��)�O(sh��)Ӌ(j��)���������˹����~���P(�D5)��������ܛ�w�C(j��)����ĩ�ˈ�(zh��)������
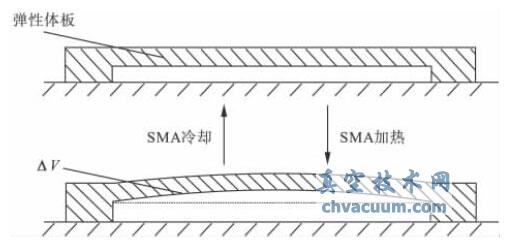
�D4 �����~���P��Ʒ
�D5 �˹������~���P
�����S�����(d��ng)���g(sh��)�����\�g(sh��)�Ͳ��ϼ��g(sh��)���ںϣ����������ȡ���g(sh��)���dδ�����@����d�ķ������P��ʹ���˹����Բ��ϣ�ģ�M����ܛ�w����׃�κ��������c��Ҏ(gu��)���P��ȣ��������P�ܺĸ��٣��m��(y��ng)�Ը���(qi��ng)���������õİl(f��)չǰ����
����3.2�����P׃�ήa(ch��n)����ն�
������׃�����ݷe���Ķ���׃����ǻ�����ķ�������һ�N�����ȡ���a(ch��n)�������������w���χ���һ��(g��)���]��ǻ�������w����׃�Σ�ʹ���P��(n��i)ǻ���ݷe��׃���Ԯa(ch��n)��ؓ(f��)��������ɽ���O(sh��)Ӌ(j��)�ˎ�ƫ�Ï��ɵ�ƫ��(d��ng)ʽSMA �����(q��)��(d��ng)���(q��)��(d��ng)����ؓ(f��)�����P(�D6)��������ԓ���P����Փģ�ͣ���ͨ�^��(sh��)�(y��n)�(y��n)�C����Փģ�ͣ����P��(n��i)��ؓ(f��)�����_(d��)�s12 kPa�����ܺĸ��١�
�D6 SMA �����(q��)��(d��ng)���(q��)��(d��ng)����ؓ(f��)�����Pԭ��ʾ��
����3.3�����P���σ�(y��u)��
��������ؓ(f��)����������׃�����ݷe�ȷ����@��һ������նȣ����P�IJ������|(zh��)����������Y(ji��)��(g��u)Ҳ��(hu��)��(du��)����Ч���a(ch��n)��һ����Ӱ푡�
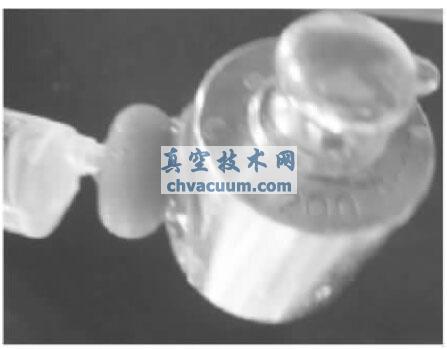
����Follador �Ȳ��ý^�����Բ��ρ�ģ�M���������w�S���Y(ji��)��(g��u)�����γɾo�ܵ��������ܷ⡣Tramacere �ȱ��^���������С�ް���(g��u)�쌦(du��)����Ч����Ӱ푣���ˮ���o�B(t��i)������(sh��)�(y��n)��(�D7)��Һ�w�ķN��s�|(zh��)��ˮ�ء����P������IJ��|(zh��)���Զ���(hu��)Ӱ�����Ч��������(j��)���~���P�Ľ��ʽY(ji��)��(g��u)����������픶˵Ŀ�ǻ����ܛ�Ă�(c��)߅�����쉺��(��)���γ����]��������⣬С���P����Ҳ���e֮̎�������@�R���@CT(Ӌ(j��)��C(j��)���Ӓ��輼�g(sh��))���^��Y(ji��)�������P�Ă�(c��)���߅�����L����(x��)С��ͬ�S���е��w�S������������ˮ�װ���ƽ�ı������������]��ա�
�D7 ˮ���o�B(t��i)������(sh��)�(y��n)
4���Y(ji��)Փ
�������ľC���������ȡ���g(sh��)���о��F(xi��n)���B��������P��Ҋ�Y(ji��)��(g��u)��ʽ�������ȡ�ķ������{(di��o)���˷������P���о��M(j��n)չ�͌�(sh��)�F(xi��n)�������S���о�������ͼ��g(sh��)���M(j��n)�������������¼��g(sh��)���·������܃�(y��u)�����P�Y(ji��)��(g��u)������(qi��ng)��ȡЧ�����Ƅ�(d��ng)���|ʽ�����ȡ���g(sh��)������r�m��(y��ng)�����Π�?yu��n)A�֡���Ч��(ji��)�ܵȷ���l(f��)չ��








