����ģ��PID���L�y���������о��c����
����Ŀǰ�S���I���У�늄��L�y������Ҫ�đ��È��ϣ��ڹ����еõ��ˏV�����Pע�����˙z�y�{���y�ڲ�ͬ�����h���µęCе��늚����Ե����ܣ���Ҫ��һ���������y�T�yԇ�c����ϵ�y�����_��ϵ�y����ָ��Ҫ�����M���T����ӡ��_������ƽ���ԇͨ�^�z�y�y�Tλ�ü��ܵ��еĽ��|���٣����ò��M늙C���y�T��Ƭ�D���M��λ�ÿ��ơ����ڲ��M늙C�D�ӽǶȺ͵�Ƭ���D�ӽǶ�֮�g���ɱ�����늙C�D��ݔ���c�y�T�����Ƕ�ݔ���ʷǾ����Pϵ�����ó�Ҏ�Ŀ��Ʒ����y�ԫ@�����˝M��Ŀ���Ч����
����ģ��߉������(fuzzylogiccontroller��FLC)�Ǐ�Zedeh�����ģ��������lչ�����ģ��m���ڟo���õ��ʴ_���Wģ�͡���ݔ�롢���в��_�����ء��Ǿ���ϵ�y�Ŀ��ơ���ˣ���ģ�����ƺͳ�ҎPID�����ЙC�ؽY����һ��ͨ�^�ڲ��M늙C�D�S�ϰ��bλ�Â�����������ģ��PID���Ʒ��������M늙C�M���p�]�h���ƣ��Ծ��_�ؿ����y�T���_�ȡ�ᘌ��@�N��r������Փ����һ�N��PID�����OӋ�ƌ��õ�Fuzzy-PID�����ķ������Y��늄��L�y�ľC�Ͽ���Ҫ���M����ϵ�y�OӋ�ͷ����о���ȡ�����^�õ�Ч����
1���L�y����
1.1������Ŀ��
�����p�]�h����ϵ�y��λ�ÿ��������ٶȿ����������M늄әC���p�ٙC��λ�Â��������y�T�͵�Ƭ�M�ɡ����M늄әC��������ʽ���M늄әC������������λ�Â�������������λ����̖�M���}�_���ƣ����C���M늄әC���ӵ�Ƭ���սo�����ٶȺ�λ�Üʴ_�o�`���D�ӵ�λ����ˣ����M늙C�Ŀ������P��Ҫ��
1.2������ԭ��
�����L�y����ϵ�y�У����M늙C��������Ǟ�1.8�șCе�Ƕȣ�ÿ�D200����һ�������}�_�����ڲ��M늄әC���Dһ�����p�ٙC�p�ٱȞ�73��1�������M늄әC�D��73�������^�p�ٙC���ú��y�T��Ƭ�D��1�����D�ӵ��ٶ�ȡ�Q���}�_�l�ʡ�����ģ��������Փ���OӋ���ٶȿ�������λ�ÿ��������p�]�h���Ʒ�ʽ��늄��L�y����ϵ�y��D2��ʾ��
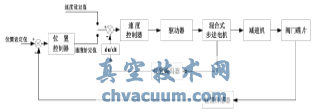
�D1 늄��L�y����ϵ�y��D
2�����Ʋ���
2.1��ģ��PID����ԭ��
����ģ��PID��������һ�N��ͨ�^��׃��ҎPID�{�����Ļ��A�ϣ���ƫ��E��ƫ��׃����DE������ݔ�룬U������ݔ��������ģ��PID���������ҿ���Ҏ�t��P��I��D�����o���{����M�㲻ͬE��DE��ʹ���،��������õĄӡ��o�B���ܡ�
2.2��ģ������Ҏ�t
ģ������������Sģ����������ݔ���λ���`��E��λ���`��׃����DE��ݔ����KP��KI��KD��׃������KP����KI����KD���y�T��Ƭ��λ�Þ�0����62�ȣ�����λ���`��E�Ļ���Փ���x���[-60��60]��λ���`��׃����DE�Ļ���Փ���[-120��120]��E��DE������ͬ���Z��ֵ����{NB��NM��NS��ZO��PS��PM��PB}������Փ���[-6��-5��-4��-3��-2��-1��0��1��2��3��4��5��6]����������3������ϵ�y�ķ������
3.1��ϵ�y��ģ�ͽ���
�������ڲ��M늄әC������늙C��늄әC��������ָ���\�ӵ���λλ��θ0�������M늄әC���Hλ��θ1���ڶ�Nԭ���c��λλ��θ0��С��࣬���������׃�Q����ʾĿ��ֵθ0(s)�Ϳ�����θ1(s)���t���f�����飺
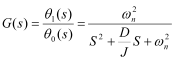
������ʽ��J��늄әC�D���D�ӑT����L1���ԸУ�Zr���D���X����iα��A�������D��ճ��Ħ��ϵ�������Mһ����C��ϵ�y����Ч�ԣ����õIJ��M늄әC��헅������1��ʾ��
������1 ���M늄әC������
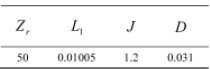
�������ϱ픵������ʽ(1)��ȡiα=1.1A���õ����f������(2)ʽ��
3.2��MATLAB��ϵ�y����
�����քe�M��ݔ�롢ݔ��׃�����`�ٺ����������_���Z��׃��Փ���x���߂��Z��׃��ֵ���oÿ���Z��׃��ֵ�x����m���`�ٺ������D2���l�ʞ�500Hz��λ�Þ�90�ȕr������õ���λ��������
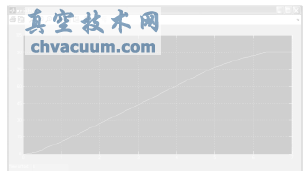
�D2 λ�÷�������
4��ģ��PID����ܛ��
�����ٶ�ģ��PID���Ƶ�ܛ���OӋ����λ�þ��a������Ӌ��õ��ٶ�ֵ���c�o���ٶȱ��^��Ӌ��õ��ٶ��`��ֵE���ٶ��`��׃����DE��Ȼ��E��DE�M��ģ����̎������DE�Ľ^��ֵС��2�r����PI�����}�_�ӕr�g������DE�Ľ^��ֵ���ڵ���2�r����ģ�����Ʊ��õ��}�_�r�L��������Ӌ������趨�r�r�L�����Ӱl����һ���}�_���ӕr�ȴ�����λ�÷���ֵ��λ�Â��������Д�����еõ������@��λ�÷���ֵ��Ӌ��λ���`���λ���`��׃���ʲ��M��ģ������������PID���ƅ���KP��KI��KD��������KP����KI����KD����Ӌ���KP��KI��KD�����PID�������ھ�У�����M��PID���ƣ���������ݔ�����ٶȽo����λ�ÿ�����Ӌ���ꮅ�����������ٶȿ�������
5���Y�Z
�����ķ���Y�����Կ���������ģ��PID���Ʒ�ʽ���L�y���������OӋ�_����ϵ�yҪ���܉�M����ٵ��o���ٶȣ����{С������ԓ�����M��ϵ�yԇ����Ҫ�_���o��λ�Õr���ٶ��ܺܿ�p�ٵ��㣬���y�T��Ƭ��λ�ʴ_��Ŀǰԓϵ�y�ѳɹ��������h�̜y�أ�Ч�����á�







