�����N���㷨��늄ӈ������������
����ᘌ���늙C�T����ɵ�늄ӈ��������ܾ��_��λ�Ć��}����B��һ�N�µ�늄ӈ����������㷨--�N���㷨����������ԓ�㷨��늄ӈ������M���˷����������ͬ�ڂ��y��늄ӈ������������N���㷨��늄ӈ���������Ҫ�κ��Ƅ��b�þ�����Ч������늙C�đT�Ԝʴ_��λ��Ԕ���������N���㷨������Matlab���̌��F��ԓ�㷨�����늄ӈ������M�з���ԇ����Y����C���N���㷨�Ŀ����ԡ���Ч�Լ������ԡ�
1������
����늄ӈ��������鹤�I�Ԅӿ���ϵ�y�еĈ���Ԫ����Ҫ��ϵ�y�l����ָ���������١��ʴ_�ķ������Դ_��ϵ�y�������\�С�ᘌ�늄ӈ�������Ŀǰ��Ҫ�����о����ǿ����㷨��늙C���ӷ�ʽ���Ƅӷ�ʽ���S���F�������V�������ڹ��I�����У����ڬF�����������܈�����Ҳ��Ŀǰ�о���һ������
�������˽�Q����늙C�đT�Զ�����늄ӈ��������ߵĆ��}��Ŀǰ���õķ����Dz��ÙCе�Ƅӻ�늚��ƄӁ��˷�늙C�đT�ԡ��mȻ���l�b�û�늴��O����ʹ늙C����ͣ�D������늄ӈ������ĽY��Ҳ���׃�î������s��ͬ�r�侫�_��Ҳ�S���Ƅ��b�õęCеĥ�p���ܵ�Ӱ푡����N���㷨���ǻ�������늙C�T��ʹ늄ӈ������ʴ_��λ�Ļ���˼�롣ͨ�^�������N���㷨��늄ӈ������M�з���ԇ�����ó��N���㷨�Ŀ���Ч��ȡ�Q��늙C���D�ӑT�����N���㷨�ą�������һ���ėl���£������N���㷨��늄ӈ������܉���ٜʴ_�ض�λ��
2��늄ӈ������ĽY��
����늄ӈ�������Ҫ�ɿ��Ɔ�Ԫ��늙C�͈��ЙC���M�ɣ������ԭ����D1��ʾ�����Ɔ�Ԫ�����o����̖�c�{���C��λ�Ʒ�������ƫ��a����������늙C�\�У����^׃�ټ������b��ݔ����λ�ƻ�ֱ�г�λ�ƣ����F���y�T��������{���C����λ�ÿ��ơ�
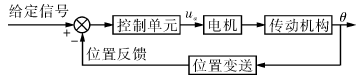
�D1 늄ӈ�����ԭ����D
����늄ӈ������ęC��ģ�Ϳɺ����飺
����ʽ�У�θ--늄ӈ������Ľ�λ��ݔ��;ua--���Ɔ�Ԫ��ݔ����

����ʽ�У�J--늙C����Ч�D�ӑT��;f--늙C����Чճ��Ħ��ϵ��;CM--����ϵ��;Z1--늙C�����X݆�X��;Z2--늙C�Ą��X݆�X��;M3--늙C�Ą��X݆��ؓ�d���ء�
3���N���㷨
���������N���㷨��늄ӈ���������Ҫ�Ƅ��b�ÿ˷�늙C�đT�ԡ�λ�÷�����̖�c�o����̖��ƫ���ek=sp–y����ek�_�������O�����ֵ�r��늄ӈ�������늙C��늣�늙C�D���ڑT�Ե������£������{���C���_���O��ֵ��
3.1���N���㷨�Ļ���˼��
�������Ȟ�늄ӈ�������λ�÷���ֵ�c�o��ֵ֮�g��ƫ��ek�O���ɂ����^�ֵ�������^�ֵα�̓����^�ֵβ����D2��ʾ��
������ƫ��^��ֵ����α�r���o늙Cͨ�������늉�;��ƫ��Ľ^��ֵ����α��β֮�g�r���Д�늙C�Դ��늙C�D���ڑT���������D�ӡ������^�ֵβ�c�������P����ƫ��^��ֵС��β�r�����J��늄ӈ������ѽ��_���˾���Ҫ�����㷨��ݔ����uk��ȡֵ��0��1��-1���քe��ʾ늙C��늡�ʩ������늉���ʩ�ӷ���늉���
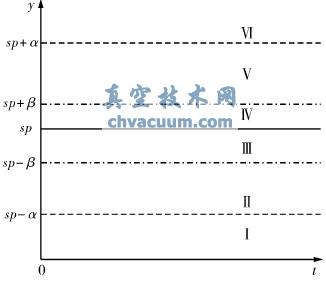
�D2 �����^�ֵα�̓����^�ֵβ
3.2���N���㷨�ľ��w����
����(1)��ek≥α�r��������ݔ��y�M��^��I�����{���C����λ��߀�]�_���O���������^�ֵ���t늙C��ԓ���D����Ҫ�o늙Cʩ������늉������N���㷨��ݔ��uk=1��
����(2)��β≤ek<α�r��������ݔ��y�M��^��II�����ȡ������^֮�g�����˷փɷN��rӑՓ��
�����ٹ���һ�ɘ����ڵĿ����㷨ݔ��uk-1=1��ƫ��ek-1≥α��������ݔ��y��ǰһ���IJɘ����ڄ��ą^��I�M��^��II���˕r���Д�늙C���Դ����uk=0��ʹ�D���ڑT�Ե��������^�m�D�ӡ��������uk-1=1��β≤ek-1<α���f��������ݔ��y����һ�ɘ�����֮ǰ���ѽ��M���˅^��II�����ڑT����������Ȼ�]�е��_�����^�������Ҫ�^�m�o늙Cʩ������늉���uk=1��
��������һ�N��r�ǣ������һ�ɘ����ڵ�ݔ��uk-1=0���f������һ���ɘ������У��D���ѽ��ڑT���������D���ˡ����@�N��r�¾͑��Д�늙C�D���Ƿ��ѽ�ֹͣ����ek≠ek-1���f��늙C�D��߀�]ֹͣ�D�ӣ������㷨��ݔ��uk=0��늙C�^�m�ڑT���������D�ӡ����ek=ek-1���f��늙C�D���ѽ�ֹͣ����ô�^�m�o늙Cʩ������늉�����uk=1;
����(3)��0≤ek<β�r��������ݔ��y�څ^��III���_������Ҫ���Д�늙C�Դ����uk=0��
����(4)��ek<-α�r��������ݔ��y�څ^��VI��늙C��ԓ���D��ʹy�pС�����ԑ��o늙Cʩ�ӷ���늉�����uk=-1��
����(5)��-α≤ek<-β�r���@�cβ≤ek<α����r��ƣ����]�ɷN��r��
�����ٮ�uk-1=-1��ƫ���ek-1≤-α�r��������ݔ��y���ą^���M��^����ʹ늙C��늣���uk=0��ʹ�D�����ÑT���D�ӡ����uk-1=-1��-α≤ek-1<-β���f��������ݔ��y�ڑT��������߀�]���_�����^�ȣ��˕r늙C��ԓ���D����uk=-1��
�����ڮ�uk-1=0�r���f������һ���ɘ�������늙C�ѽ���늣����@�N��r�¾͑��Д�늙C�D���ڑT�������µ��D���Ƿ��ѽ�ֹͣ����ek≠ek-1���f��늙C�D��߀�]ֹͣ����ʹ늙C�^�m�ڑT���������D�ӣ������㷨��ݔ��uk=0�����ek=ek-1���f��늙C�D���ѽ�ֹͣ����������ݔ��y߀�]���_�����^����ô��Ҫ�ٽo늙C�ӷ���늉�����uk=-1��
����(6)��-β≤ek≤0��������ݔ��y�څ^��������ݔ��y���_������Ҫ��ʹ늙C��늣�uk=0��
3.3���N���㷨�Ĕ��W����
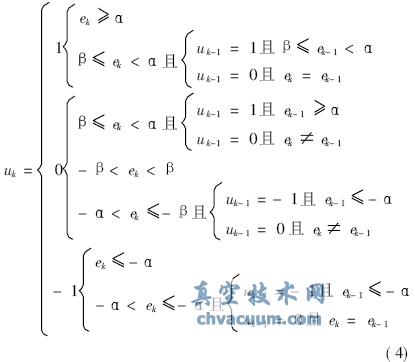
�������������N���㷨������������ʾ����ʽ(4)��ʾ�Ĕ��W���_ʽ��
4�����挍��
�����������_ʽ(4)������Matlab���̌��F�N���㷨�����քe�چ�λ�A�S������ݔ����늄ӈ������M�з��档
4.1��늄ӈ������Ć�λ�A�S푑�
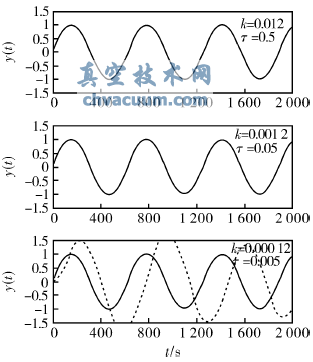
��������ʽ(2)��ʽ(3)��֪��k��τ��ֵ�c늙C���D�ӑT��J�ɷ��ȡ�����xȡ�ɽMk��τ��ֵ���چ�λ�A�Sݔ����늄ӈ������M�з��档�ɽMk��τ��ֵ�քe�飺k=0.012��τ=0.5;k=0.0012��τ=0.05���N���㷨�еą����������^�ֵ�̓����^�ֵ�O��α=0.005��β=0.003��늄ӈ�������λ�A�S푑�������D3��ʾ��
�����D3�f����늙C�T����С���m�r�������N���㷨��늄ӈ������ܿ��١��ʴ_�ض�λ�����Ǯ�늙C���D�ӑT������r��늄ӈ�������λ�A�S푑��ij��{�����ӣ��{���r�g׃�L����늙C�D�ӑT��̫��늄ӈ��������l����ʎ���@�����늙C�T��̫��ʹ늙C�D���ڑT�Ե��������D��̫���ȡ������^�ֵ֮���С�r��ƫ��Ľ^��ֵ�Oek�O���Ǵ��������^�ֵA����ʹ늄ӈ�����������늙C�T�Ե��������_���O��ֵ��
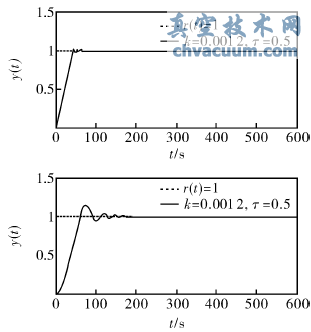
�D3 ��ͬ�D�ӑT����늄ӈ�������λ�A�S푑�
�����b���D�ӑT��̫��Ć��}��ͨ�^��׃�����^�ֵα����늙C������k=0.0012��τ=0.05��늄ӈ������M�з��棬�õ������^�ֵα=0.005��α=0.03�r늄ӈ������Ć�λ�A�S푑�������D4��ʾ��
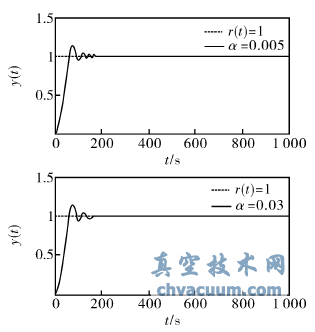
�D4 �xȡ��ͬ�����^�ֵ��늄ӈ�������λ�A�S푑�
�����ɈD4��֪���������^α��0.005���ӵ�0.03��늄ӈ������{���r�g׃�̣��Ք��ٶȼӿ죬���dz��{���]�МpС��
4.2��늄ӈ�����������푑�
����������C�����N���㷨��늄ӈ��������r׃ݔ���푑���������ݔ����늄ӈ������M�з��档
�����xȡ���M늙C������k=0.012��τ=0.5;k=0.0012��τ=0.05;k=0.00012��τ=0.005���N���㷨�еą����������^�ֵ�̓����^�ֵ�O��α=0.005��β=0.003��늄ӈ�����������푑�������D5��ʾ��
�����ɈD5��֪����늙C�D�ӑT���^С�r�������N���㷨��늄ӈ�������Ѹ�ٜʴ_�ض�λ����ۙ�r׃ݔ����̖������늙C���D�ӑT���^��r��늄ӈ������ڑT�Ե�������ƫ�x�O��ֵ��ʹƫ���^���^�����^�ֵ���Ķ�늄ӈ�������������늙C�đT�Ԝʴ_�ض�λ��
�D5 ��ͬ�D�ӑT����늄ӈ���������푑�
������׃�����^�ֵα��늄ӈ������M�з��棬�õ������^�ֵ�քeα=0.005��α=0.03�r늄ӈ�����������푑�������D6��ʾ��
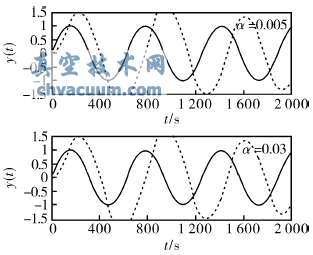
�D6 ��׃�����^�O��ֵ�r늄ӈ�����������푑�
�����ɈD6��֪����׃�����^�ֵ������Y����Ӱ푲����@���f���N���㷨���ڕr׃��ݔ����̖�ĸ�ۙ������Ҫȡ�Q��늙C���D�ӑT����
5���YՓ
����ᘌ�늄ӈ������Ƅ��b�Ì�늄ӈ������Y�������ܵ�Ӱ푣����˺���늄ӈ������ĽY����ͬ�r����䶨λ�Ĝʴ_�ԣ��о����N���㷨��늄ӈ������еđ��á�����ԓ�㷨��늄ӈ���������Ҫ�Ƅ��b�á�ͨ�^��ƫ���O�Ã����^�ֵ�������^�ֵ��ʹ늄ӈ�������늙C�T�Ե��{�����ʴ_��λ��ͨ�^����ԇ�ó��YՓ������x����m��늙C�D�ӑT���������^�ֵ�������N���㷨��늄ӈ������܌��F�ʴ_���ٵض�λ�����ǣ����ڕr׃��ݔ����̖����늙C�D�ӑT��̫�����r�£���ʹ�{�������^�ֵ�Ĵ�С����Ȼ�o��ʹ늄ӈ������ʴ_��λ����ˣ���θ��ƻ����N���㷨��늄ӈ��������r׃ݔ��ĸ�ۙ���܌�����һ�����о�����







